Робототехніка − прикладна наука, що займається розробкою автоматизованих технічних систем (роботів). Орієнтована на створення роботів і робототехнічних систем, призначених для автоматизації складних технологічних процесів і операцій, у тому числі для заміни людини при виконанні важких і небезпечних робіт.
Термін «робототехніка» запровадив письменник-фантаст Айзек Азімов у 1940-х роках.
 Письменник-фантаст Айзек Азімов
Письменник-фантаст Айзек Азімов
Обов’язкові правила поведінки для роботів, сформульовані А. Азімовим в оповіданні «Я, робот» такі:
- Робот не може заподіяти шкоду людині або своєю бездіяльністю дозволити, щоб людині була заподіяна шкода;
- Робот повинен підкорятися наказам людини, за винятком тих, котрі суперечать першому пункту;
- Робот повинен захищати самого себе, якщо тільки його дії не суперечать першому і другому пунктам.
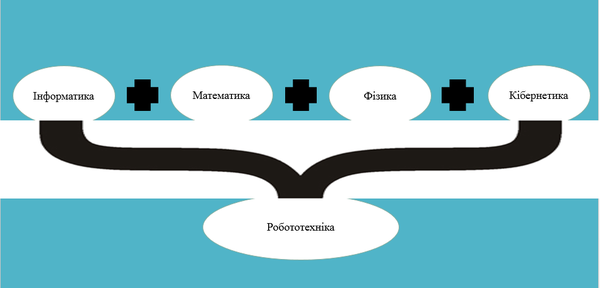
Робототехніка спирається на такі дисципліни, як інформатика, фізика, математика, кібернетика.
Які є приводи роботів?
Привід — це «м’язи» роботів. В наш час, на початку XXI століття, найбільш розповсюдженими рушіями у приводах є електричні, але застосовуються й інші, що використовують хімічні речовини або стиснене повітря.
- Двигуни постійного струму : Поки що, більшість роботів використовують електродвигуни, які можуть бути декількох видів.
- Крокові електродвигуни: Як можна припустити з назви, крокові електродвигуни не обертаються вільно, подібно до двигунів постійного струму. Вони повертаються покроково на певний кут під керуванням контролера. Це дозволяє обійтися без давача положення, оскільки контролеру точно відомо, на який кут було зроблено поворот.
- П'єзодвигуни: Сучасною альтернативою двигунів постійного струму, є п'єзодвигуни, також відомі як ультразвукові двигуни. Принцип їх роботи абсолютно відрізняється: маленькі п'єзоелектричні ніжки, які вібрують з частотою більше 1000 разів на секунду, змушують мотор рухатися по колу або прямій. Перевагами подібних двигунів є висока швидкість і потужність, непорівнянна з їх розмірами. П'єзодвигуни вже доступні на комерційній основі й також застосовуються на деяких роботах.
- Повітряні м'язи: Повітряні м'язи — простий, але потужний пристрій для забезпечення сили тяги. За накачування стисненим повітрям, м'язи здатні скорочуватися до 40 % від власної довжини. Причиною такого поводження є плетіння, видиме з зовнішнього боку, яке змушує м'язи бути або довгими й тонкими, або короткими й товстими. Через те, що спосіб їх роботи схожий з біологічними м'язами, їх можна використовувати для виробництва роботів з м'язами й скелетом, аналогічними м'язам і скелету тварин.
- Електроактивні полімери: електроактивні полімери (ЕАП) — це вид пластмас, який змінює форму у відповідь на електричну стимуляцію. Вони можуть бути сконструйовані таким чином, що можуть гнутися, розтягуватися або скорочуватися. Однак, досі немає ЕАП, придатних для виробництва комерційних роботів, оскільки вони неефективні або неміцні.
- Еластичні нанотрубки: Це далекосяжна експериментальна технологія, що знаходиться на ранній стадії розробки. Відсутність дефектів у нанотрубках дозволяє цьому волокну еластично деформуватися на кілька відсотків. Людський біцепс може бути замінений проводом з такого матеріалу діаметром 8 мм. Такі невеликі «м'язи» можуть допомогти роботам у майбутньому, обганяти і перестрибувати людей.

Які є рухові апарати роботів?
- Колісні роботи: одно-, дво-, три-, чотири- та багатоколісні.
- Крокуючі роботи: дво-, чотири-, шести- та багатоногі. За способом зчеплення ноги, виділяють: з фіксацією ноги з використанням вакуумних присосок; зі зчепленням спеціальними пристроями або формою (волоски і щетинки у роботів, подібні до комашиних); без спеціального способу фіксації. Окремо можна виділити роботів-андроїдів, що наслідують рухи людини.
- Плавальні роботи: надводні роботи; підводні роботи; гном.
- Літаючі роботи: безпілотний літальний апарат (БПЛА)
- Інші способи руху: стрибальні роботи; роботи, що наслідують рухи змії; роботи, які повторюють рухи черв'яка.
Якою ж була історія роботів?
Історія роботів розпочинається із ідеї про створення людиною живої істоти. Якби людина змогла це зробити, то вона би повторила акт деміурга – створення живого, навіть якщо «життя» при цьому дещо по-іншому розуміється.
Перші рецепти створення життя ґрунтувалися на міфах, магії та релігії. Довгий час у багатьох культурах переважало переконання, що людина була створена із глини, а отже найближчим шляхом буде саме глино-технологія. Але якщо із глиною проблем не виникало, то от із іншою складовою – душею, свідомістю, розумом, які гарантували певну самостійність існування живої істоти, розібратися не могли.
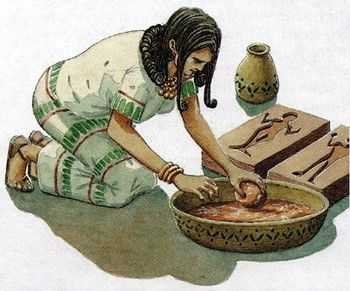 Ліплення людини із глини (реконструкція).
Ліплення людини із глини (реконструкція).
Навіть із розвитком техніки, повністю ідея міфічного акту створення життя не зникла повністю, а переселилася у готичні романи, а згодом у фантастику. Прикладами таких «експериментів» можна назвати ґолема та монстра Франкенштайна.
 Франкенштайн (1932)
Франкенштайн (1932)
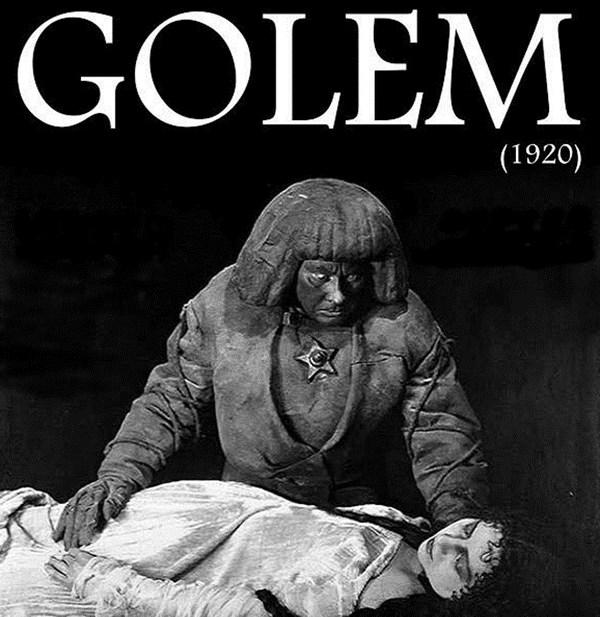 Фільм «ґолем»(1920)
Фільм «ґолем»(1920)
Наступний етап в історії роботів пов'язаний із розвитком механіки та застосуванням певних відкриттів для розваг аристократів. Поява легендарних автоматонів ще в Античності (хоч до нашого часу вони не дійшли) і їхній розвиток у Середньовіччі були революційними і цікавими.
 Автоматони
Автоматони
Історія розвитку робототехніки сягає своїм корінням в далеку давнину за часів античності. Бажаючі полегшити трудову діяльність і просто гнані науковою ідеєю, винахідники давнини створювали найпростіші механізми, що виконували деякі елементи руху.
Перші креслення, що збереглися, належали Да Вінчі, який створив робота-лицаря, що рухався.
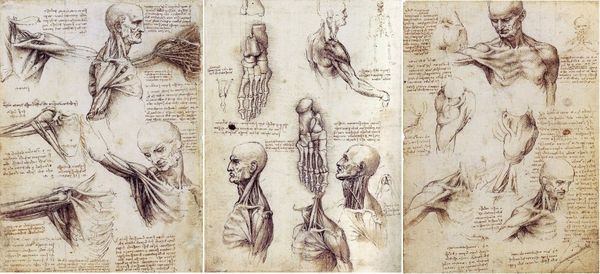
 Да Вінчі «Робот-лицар»
Да Вінчі «Робот-лицар»
Історія сучасних роботів пов’язана із кількома людьми. Сам термін «робот» з’явився завдяки творчості чеського письменника Карела Чапека і його фантастичній п’єсі «Rossumovi univerzální roboti» (1920). Якщо точніше, це були не зовсім роботи, а радше кіборги (навіпмеханічні і напіворганічні істоти). Однак в науці слово закріпилося і застосовується досі.
Двадцяте століття було ознаменоване становленням сучасної робототехніки, появою роботів, здатних виконувати записану послідовність команд. Пізніше в 1942 році Айзеком Азімовим – відомим письменником і популяризатором науки –введено термін «робототехніка». А також він був першим автором, який сформулював в своїй книзі 3 закони робототехніки, які зазначені на самому початку статті.
Доволі швидко у цій сфері зрозуміли, що недостатньо лише зробити тіло робота. У цьому випадку ми отримуємо лише механічну ляльку. Набагато важливіше придумати, як робота зробити автономним. Щоб він думав, вирішував, демонстрував свободу волі, адаптувався до середовища, пізнавав світ і самоусвідомлювався. Ця ідея стала визначальною для подальшого розвитку робототехніки. Назвемо основні факти – як все було…
1948 рік – Норберт Вінер сформулював принципи кібернетики, які лягли в основу практичної робототехніки.
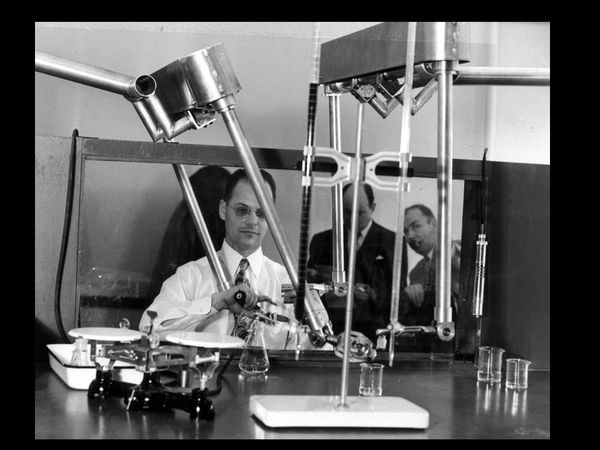
1951 рік – Реймонд Герц запатентував дистанційну «руку», яка застосовувалася для роботи із радіоактивними матеріалами.
1959 рік – розробка першого промислового робота. Перший промисловий робот був створений винахідником-самоучкою Джорджем Деволом. Робот важив дві тони і управлявся програмою, записаною на магнітному барабані. Творці використовували гідравлічні приводи, а точність маніпулятора становила 0,254 мм. В результаті був оформлений патент США № 2988237 і заснована компанія Unimation. Саме Unimation Джорджа Девола прийнято вважати родоначальником роботобудування.
1960-ті рр. – з’являється «Звір» (Beast) в Університеті Джона Гопкінза (США). Мобільний прото-робот, який мав зародки власного інтелекту і орієнтувався у просторі.
1962 рік – встановлений перший циліндричний робот промислового типу Versatran від компанії AMF (American Machines and Foundry), розроблені Джонсоном (Harry Johnson) та Міленковічем (Veljko Milenkovic). Такі роботи були встановлені на заводі Ford у Гуанчжоу, США. Назва Versatran була від слів "versatile transfer".
1965 рік – General Electric випускають «Квадропед» (Walking Truck). Вага – більше тони. Основна місія цього робота – допомога солдатам долати пересічену місцевість.
1968-1969 рік – створений перший промисловий робот «стенфордська рука» – робот-маніпулятор аналогічний людській руці і поява «Щупальця» Марвіна Мінскі.

1969 рік – створення першого зразка технічного зору для робота. Перший технічний зір для промислових роботів було продемонстровано в Стенфордському дослідницькому інституті.
1969 рік – поява перших фарбувальних роботів у світі. Норвезька корпорація розробила Trallfa – перші промислові фарбувальні роботи для власного використання. Основним поштовхом для розвитку цього напрямку стала нестача робочої сили в цьому періоді.
1970 рік – презентація Шейкі – мобільного робота, здатного створювати карти простору і орієнтуватися завдяки ним.
1970 рік – Hitachi (Японія) створило інтелектуальний технічний зір. Робот вперше зміг визначати габарити виробів і місце їх розташування.
1971 рік – встановлена перша роботизована лінія на заводі Daimler Benz. Перша виробнича лінія із застосуванням зварювальних роботів в Європі була поставлена компанією KUKA на завод Daimler Benz, Sindelfingen.
1973 рік – створений перший шести-осьовий промисловий робот в світі KUKA Famulus. KUKA розриває угоду про використання роботів Unimate і приступає до розробки власних роботів. Промисловий робот KUKA Famulus, був першим у світі шести-осьовим маніпулятором із застосуванням електроприводу для всіх осей.
1973 рік – розробка нового типу робота Stanford arm. Stanford arm – це роботизована рука, призначена для складання невеликих виробів з використанням датчиків торкання і сенсорів зворотного тиску. Управління роботом здійснювалося з допомогою міні-ЕОМ. Пізніше, творець даного робота професор Шейман заснував компанію Viacarm Inc для просування і реалізації даної технології на виробничих підприємствах.
1974 рік – поява першого промислового контролера для управління роботом. За замовленням компанії Cincinnati Milacron Corporation був створений перший у світі промисловий робот – програмований контролер. Робот був названий T3.
1974 рік – вперше був застосований цифровий мікропроцесор в контролері робота. Промисловий робот IRB 6 від компанії ASEA (майбутня ABB), був першим маніпулятором управління, яке здійснювалося контролером S1, в якому використовувався 8-ми бітний мікропроцесор Intel. Об’єм пам’яті процесора становив 16Кб. S1 мав 16 цифрових входів/виходів і програмувався з допомогою 16 клавіш і чотирирозрядного цифрового дисплея.
1975 рік – створено перший промисловий робот вантажопідйомністю до 60 кг. З появою попиту в автомобільній промисловості на роботи з більш високою вантажопідйомністю, компанія ABB створила перший у світі промисловий робот з корисним навантаженням до 60 кг. Вперше цей робот був використаний на заводі Saab, Швеція.
1976 рік – робот вперше в космосі. Рука робота вперше була застосована в космічних зондах Viking 1 і 2.
1978 рік – перші універсальні складальні роботи PUMA від Unimation і Vicarm. За підтримки General Motors, були впроваджені роботи PUMA (Unimation/Vicarm) для автоматизації складальних процесів. Це дозволило скоротити значну частину людей, зайнятих у подібних рутинних операціях.
1978 рік – розробка перших роботів SCARA. Хіроші Макино з університету Яманасі, Японія, розробив робота-SCARA. Це був технологічний прорив, оскільки саме роботи Scara були оптимальним рішенням для деяких технологічних операцій пов’язаних з швидким переміщенням виробів.
1979 рік – створений перший робот з використанням редукторів. Завдання по автоматизації точкового зварювання, відкрили нову еру в робототехніці з застосуванням електро-редукторів, які прийшли на зміну гідравлічним приводам. Компанія Nachi, Японія розробили перший робот на базі редукторів.
1981 рік – виробництво перших роботів Puma в Європі. Фінська компанія Nokia приступила до виробництва промислових роботів за ліцензії Unimation. У 1980-их роках було випущено близько 1500 роботів з торговим назвою Puma, серед них була популярна модель Puma-560.
1982 рік – IBM (International Business Machines сorporation) розробляє мову програмування для роботів. Спеціально для роботизованих пропозицій IBM створив потужну і легко застосовну мову програмування.
1983 рік – під час аварії на АЕС Трі-Майл-Ійленд було застосовано мобільного робота-ремонтника, оскільки радіація перешкоджала роботі рятівників-людей.
1984 рік – компанія Adept з'явилася на ринку новий тип роботів SCARA із застосуванням електродвигунів. Нова конструкція зробила роботи більш простими і надійними, зберігши високу швидкість.
1985 рік – вперше роботи почали виготовляти роботів. Перші, хто використовував власні промислові роботи для створення роботів, була компанія Fanuc.
1992 рік – компанія ABB (Asea Brown Boveri) представила принципово новий контролер S4. Він значно полегшив створення робочих програм робота за рахунок зручного зовнішнього інтерфейсу.
1992-1994 рік – роботи Данте почали вивчати кратери вулканів і готуватися відправитися в космос. Хоч перша спроба завершилася невдало і робот не зумів дійти до місця призначення, але це не зупинило науковців.
1996 рік – компанія KUKA випустила перший контролер на базі Windows. Вперше контролер запропонував користувачу зрозумілий інтерфейс Windows, а так само 6d мишку для спрощення і прискорення процесів створення керуючих програм.
1996-1997 рік – на Марс було відправлено марсохід, який зумів дистанційно дослідити геологічні зразки, сфотографувати поверхню і дещо наблизити людство до омріяної колонізації Сонячної системи.
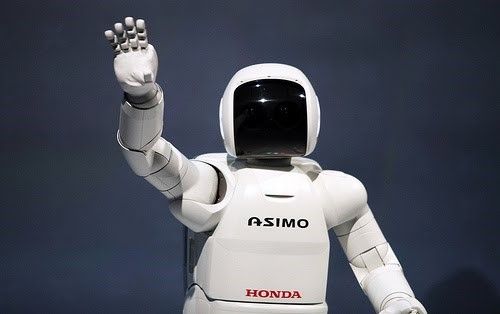
2000 рік – корпорація Honda випускає Asimo – робота-андроїда, який легко пересувається у просторі, має складну і сучасну систему орієнтування та розпізнавання об’єктів навколо себе.
2003 рік – робот відправився на Марс. Місія Mars Exploration Rover почалася в 2003 році з моменту відправлення з двох роботизованих марсоходів для дослідження Марса і його геології.
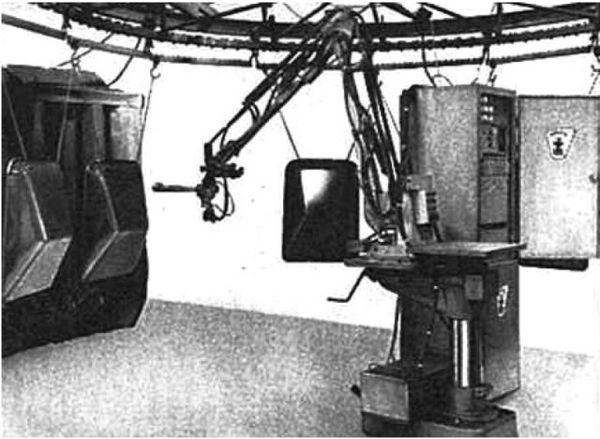
2003 рік – компанія KUKA – першою з виробників промислових роботів представила Атракціон, який отримав назву Robocoaster. Він застосовувався в парках розваг і спеціалізувався на екстремальному обертанні любителів гострих відчуттів.
2004 рік – компанія Motoman представила перший контролер (NX100), який забезпечував синхронне керування чотирма роботами (до 38 осей). NX100 отримав сенсорний екран і базувався на операційній системі WindowsCE.
2004 рік – розважати людство починає Робосапіен, дітище Марка Тілдена.
2006 рік – створення людиноподібного промислового робота Motoman, Японія. Даний робот з 13 осями дуже добре проявив себе в операціях зі складання виробів.
2007 рік - перший промисловий робот вантажопідйомністю 1000 кг KUKA.
2008 рік – робот вчиться грати на скрипці
2010 рік – робот опановує фортепіано.
2013 рік – Google купують компанію Boston Dynamics, яка активно долучається до роботобудування. Основні робото-діти: BigDog, CHEETAH, LittleDog, Atlas та ін. Дехто із знавців передбачає, що саме із цих роботів або їхніх дітей почнеться кінець людства. Чому? Бо в роботів хороша пам’ять.
Еволюція роботів тісно пов’язана із загальним технічним прогресом людства, із пошуками супер-інтелекту, із побоюваннями щодо майбутнього і мріями трансгуманістів про нові можливості наших нащадків.
Що таке робототехніка на платформі Arduino?
Arduino (Ардуіно) – апаратна обчислювальна платформа, основними компонентами якої є плата введення-виведення і середовище розробки. Arduino може використовуватися як для створення автономних інтерактивних об’єктів, так і підключатися до програмного забезпечення, що виконується на комп’ютері. Arduino як і Raspberry Pi відноситься до одноплатних комп’ютерів.
Як пов'язані Arduino і роботи?
Відповідь дуже проста – Arduino часто використовується як мозок робота.
Перевага плат Arduino перед аналогічними платформами – відносно невисока ціна і практично масове поширення серед любителів і професіоналів робототехніки та електротехніки.
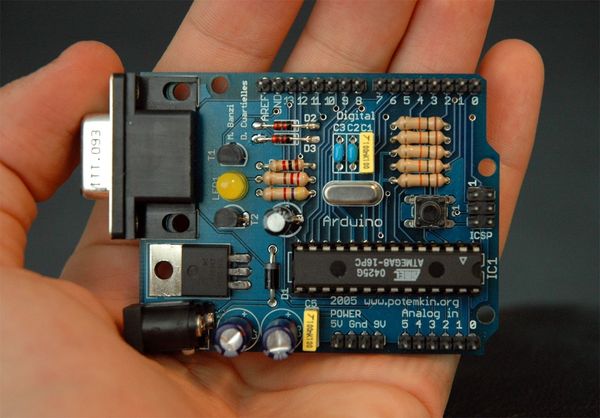
В наш час вивчення робототехніки значно помолодшало, і кожен школяр сьогодні може стати справжнім вченим-конструктором. Як стартова платформа для розвитку навичок роботобудування, ідеально підходить платформа Arduino. Вона являє собою зменшений комп'ютер, який дозволяє програмувати дії для управління будь-якими механізмами, включаючи складні конструктори та роботи. Діти будь-якого віку можуть програмувати електронні проекти, складність буде залежати від їх навичок і знань, а також створювати корисні для дому та дозвілля моделі, що виконують ряд функцій. Їм належить освоїти справжні мови програмування С ++ та Scratch for Arduino.
Які сучасні моделі роботів?
З розвитком науки та техніки, підтримкою інновацій робототехніка перетворилася в самостійну наукову сферу. Головною властивістю будь-якого механізму та робота є його корисність. Залежно від корисності машини в тій чи іншій сфері життя заведено виділяти такі різновиди роботів: будівельні, промислові, побутові, авіаційні, медичні, дослідницькі, ігрові, екстремальні (військові, космічні, підводні).
Також роботи можна розділити на:
- керовані й автономні;
- мобільні та стаціонарні.
5 основних напрямків розвитку робототехніки
- Промислова автоматизація та роботи
- Безпілотники
- Логістика
- Медичні роботи
- Штучний інтелект
У сучасній медицині роботи випускаються серійно, і без багатьох з них складні діагностичні процедури були б зовсім неможливі. У 1985 році робот Unimation Puma 200 допомагав у взятті біопсії мозку в пацієнта, що стало значним проривом робототехніки в медицині. Пізніше, через 7 років робот ProBot зробив вперше в світі самостійно операцію.
 Робот Unimation Puma 200
Робот Unimation Puma 200
Розробка першого побутового робота була здійснена компанією Sony, і в пам'яті багатьох людей залишився саме цей вид робота як вершини технічного розвитку. Його звали AIBO і виглядав він як собака.
 Sony Aibo робот собака
Sony Aibo робот собака
Для забезпечення безпеки та охорони громадського порядку всюди застосовуються роботи в сучасному світі. Так, поліція й охоронні організації широко застосовують для цих цілей безпілотні літальні апарати (БПЛА).
За робототехнікою однозначно велике майбутнє і кожен з нас через кілька десятків років матиме можливість використовувати складні роботизовані системи у повсякденному житті.
Де мають застосування сучасні роботи?
Оскільки все більше і більше роботів призначено для виконання окремих завдань, важливо зробити їх класифікацію. Наприклад, багато роботів призначено для праці з монтажу, і не можуть бути легко пристосовані для інших застосувань. Їх називають «складальними роботами». Для зварювання шва, деякі виробники постачають повні зварювальні системи з роботом, тобто зварювальне устаткування поряд з іншими зручностями обробки матеріалів, таких як, поворотні столи та інше, як єдине ціле. Така інтегрована роботизована система, називається «зварювальний робот». Деякі роботи спеціально призначені для маніпулювання важкими навантаженнями і позначені як «важкі роботи службових обов'язків».
Можливі області застосування роботів можуть бути такими.
Військові роботи.
Caterpillar планує розробити дистанційно керовані машини та повністю автономних важких роботів. Деякі підіймальні крани, вже керуються дистанційно.
Було показано, що робот може виконувати скотарські завдання.
Роботи все частіше використовуються у виробництві (з 1960 року). В автомобільній промисловості, вони можуть складати більше половини від загальної «праці». Є навіть фабрики «з вимкненим світлом», такі як завод з виробництва клавіатур IBM у Техасі, котрий на 100 відсотків автоматизовано.
Роботи, такі як HOSPI, використовуються як кур'єри в лікарнях (лікарняний робот). Інші лікарняні завдання, виконують роботи рецепціонери, гіди і носильники-помічники
Роботи можуть служити офіціантами і кухарями, також і у домашніх умовах. «Boris» – це робот, який може завантажувати посуд до посудомийної машини.
Робот бойового спорту — хобі або спортивний захід, де два або більше роботів борються на арені, щоби вимкнути один одного.
Очищення забруднених територій від токсичних відходів або продуктів ядерних установок.
Сільськогосподарські роботи (AgRobots).
Внутрішні роботи, очищення приміщення та догляд за людьми похилого віку.
Медичні роботи, що виконують дії з малоінвазивної хірургії.
Домашні роботи з повним використанням.
Освітня робототехніка.
Роботи стали поширеним навчальним посібником у деяких середніх і вищих навчальних закладах, а також у численних літніх таборах молоді, задля підвищення інтересу до програмування, штучного інтелекту і робототехніки серед студентів. У деяких університетах світу, перший рік навчання включає комп'ютерні курси програмування роботів, на додаток до традиційної програмної інженерії, на основі курсових робіт.

Використані джерела:
- Інтернет-сайт: https://chg.dcz.gov.ua/publikaciya/robototehnika-shtuchnyy-intelekt
- Інтернет-сайт: http://edurobots.ru/kurs-arduino-dlya-nachinayushhix/
- Інтернет-сайт: https://lviv.com/panoptykum/korotka-istoriya-robotiv/
- Інтернет-сайт: https://www.imena.ua/blog/5-directions-of-development-of-robotics/
- Інтернет-сайт: https://sites.google.com/site/leonardodavinci4proekt/home/povitranij-gvint/robot---licar
- Інтернет-сайт: https://sites.google.com/site/robototehnika98/rozvitok-robototehniki
- Інтернет-сайт: https://uk.wikipedia.org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82%D0%BE%D1%82%D0%B5%D1%85%D0%BD%D1%96%D0%BA%D0%B0
Статтю підготувала студентка ІІI курсу спеціальності Математика денної форми навчання Ірина Леськів (група МІ18Б) у межах звіту про вивчення курсу «Історія науки і техніки» (викладач – професор Р.Я. Ріжняк). Презентацію до статті можна скачати тут.